11
Dec
2018

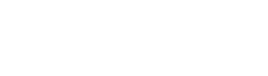


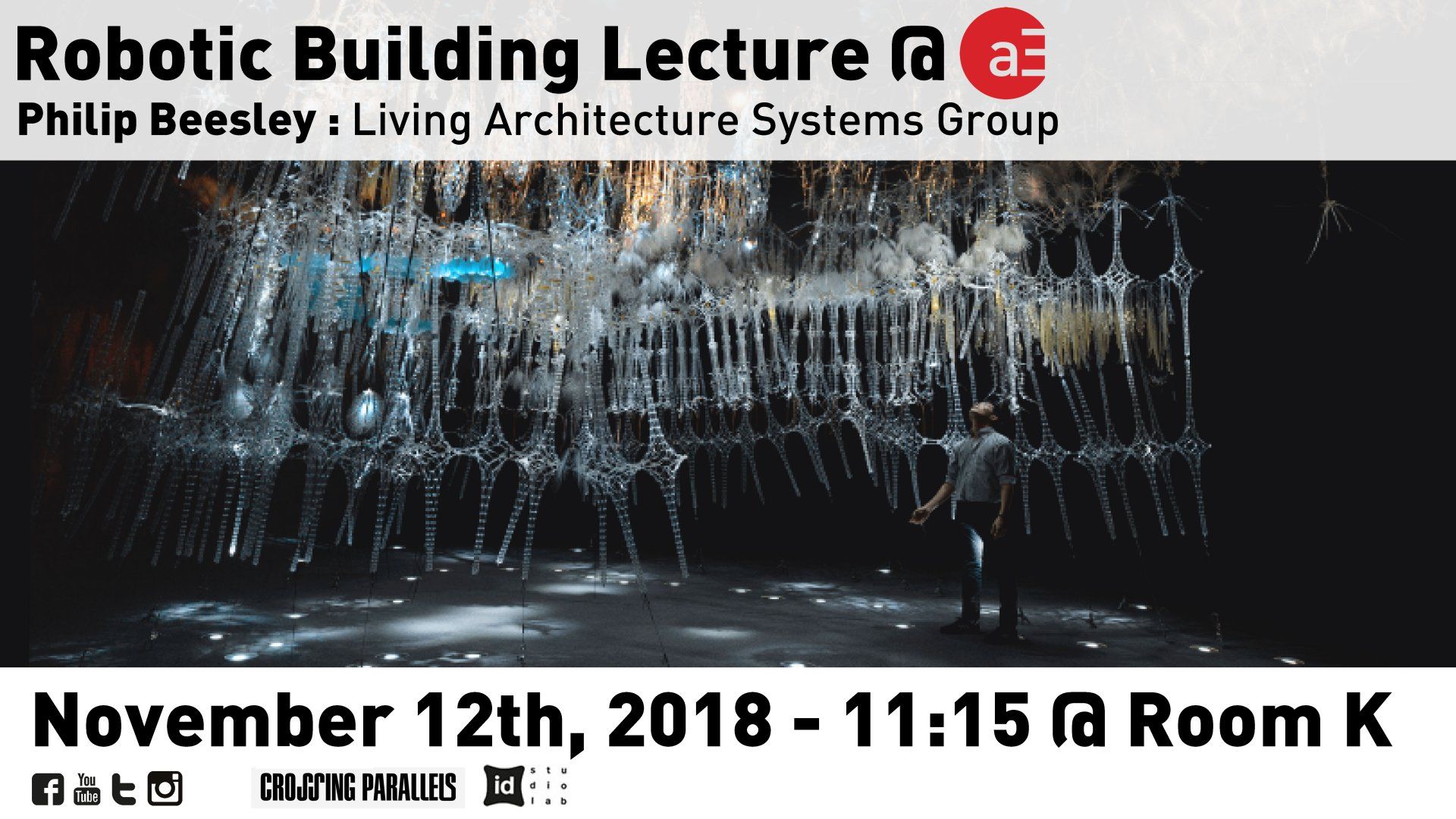
New projects by the Living Architecture Systems Group will be presented, providing detailed illustrations of prototypes and offering design methods that could be applied to contemporary design. These ‘living labs’ harness emerging technologies into a responsive, breathing, sentient architecture by combining detailed artificial fabric systems from fashion and heavy structures from architecture. Newly invented structural systems combine mechanics, sound, light, and filtering systems using artificial intelligence and synthetic biology. The work evolves through collaborative exchanges with an international network of scientists, engineers, and artists including Atelier van Herpen and Salvador Breed of 4DSOUND in Amsterdam, University of Waterloo researchers, engineer lead Rob Gorbet, and the main Living Architecture Systems studio in Toronto.

Alexander Liu Cheng, Henriette Bier, and Galoget Latorre publish a paper on Actuation Confirmation and Negation via Facial-Identity and -Expression Recognition on occasion of the IEEE 3rd Ecuador Technical Chapters Meeting 2018 (http://sites.ieee.org/etcm-2018/) conference held in Cuenca, Ecuador (15-19 Oct. 2018).
Abstract
This paper presents the implementation of a facial-identity and -expression recognition mechanism that confirms or negates physical and/or computational actuations in an intelligent built-environment. Said mechanism is built via Google Brain’s TensorFlow (as regards facial identity recognition) and Google Cloud Platform’s Cloud Vision API (as regards facial gesture recognition); and it is integrated into the ongoing development of an intelligent built-environment framework, viz., Design-to-Robotic-Production & -Operation (D2RP&O), conceived at Delft University of Technology (TUD). The present work builds on the inherited technological ecosystem and technical functionality of the Design-to-Robotic-Operation (D2RO) component of said framework; and its implementation is validated via two scenarios (physical and computational). In the first scenario—and building on an inherited adaptive mechanism—if building-skin components perceive a rise in interior temperature levels, natural ventilation is promoted by increasing degrees of aperture. This measure is presently confirmed or negated by a corresponding facial expression on the part of the user in response to said reaction, which serves as an intuitive override / feedback mechanism to the intelligent building-skin mechanism’s decision-making process. In the second scenario—and building on another inherited mechanism—if an accidental fall is detected and the user remains consciously or unconsciously collapsed, a series of automated emergency notifications (e.g., SMS, email, etc.) are sent to family and/or care-takers by particular mechanisms in the intelligent built-environment. The precision of this measure and its execution are presently confirmed by (a) identity detection of the victim, and (b) recognition of a reflexive facial gesture of pain and/or displeasure. The work presented in this paper promotes a considered relationship between the architecture of the built-environment and the Information and Communication Technologies (ICTs) embedded and/or deployed.

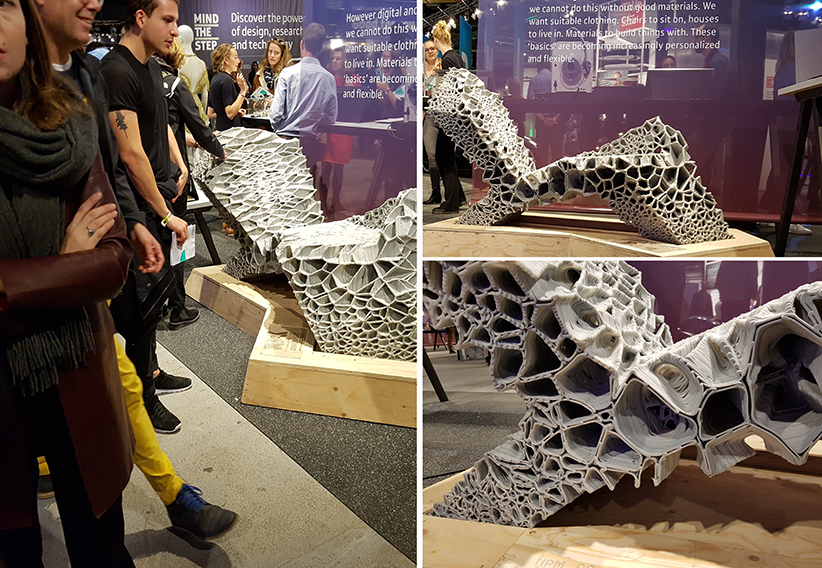
She will present the Variable Stiffness chaise-longue recently developed with 4TU funding in collaboration with TUE, EPFL, and industry partners 3D Robot Printing, and 010Works.
http://todaysart.nl/2018/program/crossing-parallels/
http://www.roboticbuilding.eu/project/variable-stiffness/

Panelists and visitors at Crossing Parallels session of Today’s Art, where the main topic was on opportunities and challenges of collaborative projects.

While architecture and architectural production are increasingly incorporating aspects of non-human agency employing data, information and knowledge contained within the (worldwide) network connecting electronic devices, the relevant question for the future is not if but how robotic systems will be incorporated into building processes and physically built environments (Bier 2013) in order to improve everyday life. The first book of the Adaptive Environments (AE) series on Robotic Building (RB) aims to answer this question by critically reflecting on the achievements of the last decades in the application of robotics in architecture and furthermore outlining potential future developments and their societal implications.
https://doi.org/10.1007/978-3-319-70866-9
His research focusses on developing and integrating methods of form-finding and reconfigurable assembly in Design-to-Robotic-Production.